I am currently working as a
Research Scientist
on the General AI team at
Horizon Robotics
,
where I work on a broad array of robot learning problems.
I am advised by Wei Xu.
|
Email /
CV /
|
|
Hi! Thanks for visiting my website ^_^ I am currently a research scientist on the General AI team at Horizon Robotics. Before that, I obtained my Ph.D. in computer science at UCLA, where I was a member of the Structures-Computer Interaction (SCI) Lab. There, I was co-advised by Professors M. Khalid Jawed, Jungseock Joo, and Demetri Terzopoulos. During my Ph.D., my research involved fields such as robotics, physical simulation, perception, and machine learning. Key focuses involved developing fast, accurate simulators for soft robots / deformable structures, and leveraging simulations to learn robust sim2real policies for robotic deformable object manipulation. As of now, my current research focuses pertain to general robotic AI. I am particularly interested in leveraging large datasets for creating efficient and general learning pipelines via reinforcement learning and foundational models. I am the main developer for the soft robotics / structures simulation framework DisMech, where I try to actively maintain the project in my free time. Website last updated on Sep 2nd, 2025. |


|
|

|
|
|
IEEE Robotics and Automation Letters (RA-L), 2025 Project Page End-to-end visuomotor policy learning for sim2real quadruped mobile manipulation. Policies are trained using a teacher-student framework on a multi-stage pick-and-place task and transfer with ~80% success to real hardware. Emergent behaviors include re-grasping and task chaining, with extensive ablations identifying key ingredients for successful sim2real transfer. |
|
IEEE Transactions on Automation Science and Engineering (T-ASE), 2025 (* equal contribution) Source Code / Video / Oral Presentation / News Coverage End-to-end pipeline for full sim2real robotic paper folding. Neural force manifolds are learned from physical simulation and are used to generate optimal folding trajectories. Scaling analysis is used to obtain a generalizable control policy with respect to material and geometric parameters. |
|
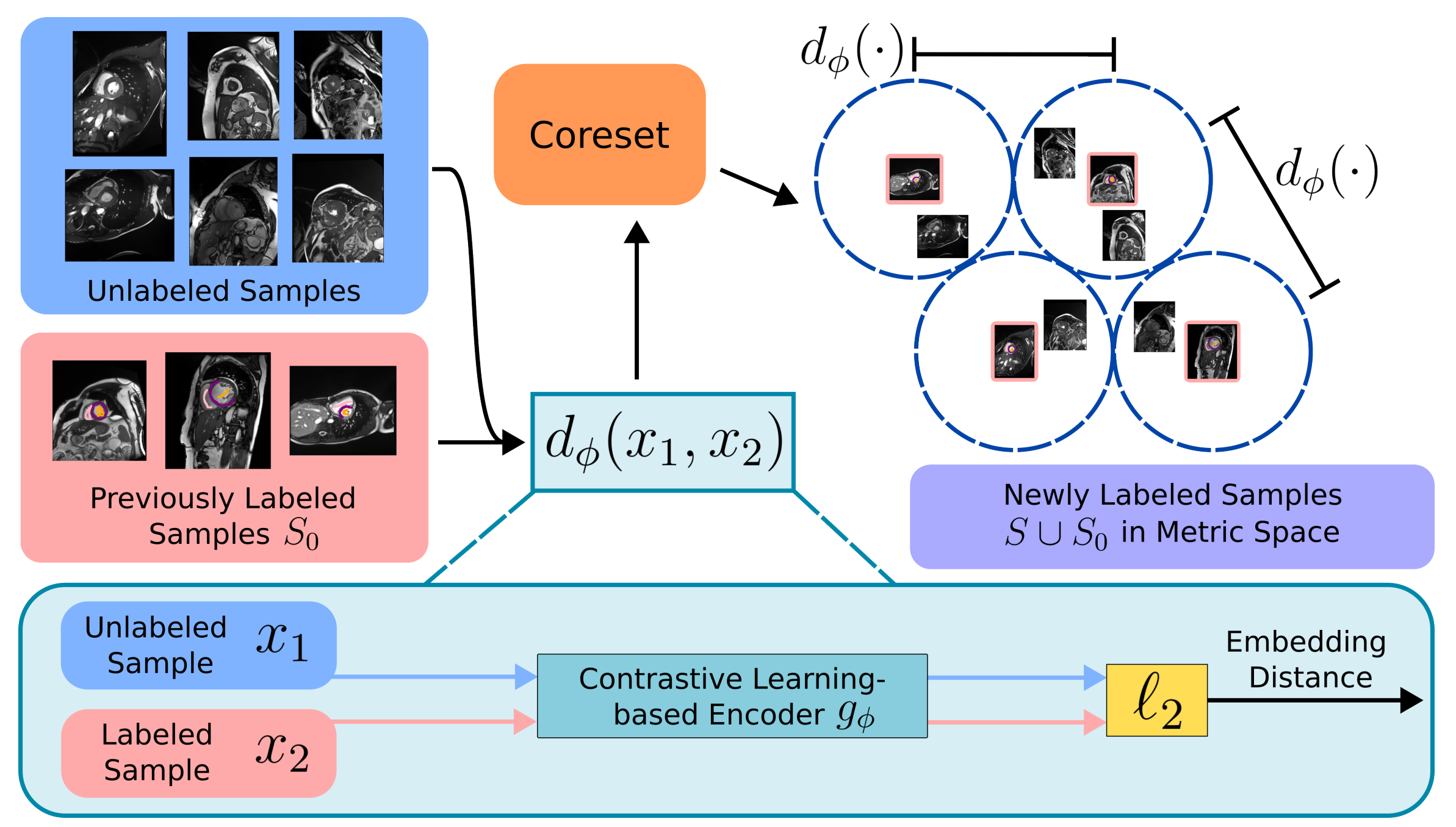
Conference on Neural Information Processing Systems (NeurIPS), 2024 Source Code Slice-based active learning approach for 3D segmentation. Contrastive learning with Coreset enables metric learning by leveraging inherent data groupings in medical imaging. Evaluations on four datasets reveal enhanced performance over existing active learning methods, achieving cost-efficient low-annotation training. |
|
The International Journal of Robotics Research (IJRR), 2024 Source Code / Video End-to-end pipeline for full sim2real robotic DLO deployment. Physical simulations are used to train a neural controller capable of deploying rods along a prescribed pattern. Scaling analysis is used to obtain a generalizable control policy with respect to material and geometric parameters. |
|
IEEE Robotics and Automation Letters (RA-L), 2024 Source Code / Video / Oral Presentation Full scale generalizable physical simulator capable of simulating soft physics, frictional contact, and continuum control. A fully implicit formulation allows for increased computational efficiency while maintaining physical accuracy when compared to previous SOTA. |
|
IEEE Robotics and Automation Letters (RA-L), 2023 Source Code & Data / Video Robust and rapid instance segmentation of DLOs via skeleton pixel traversals. Segmentations are generated on topologically corrected skeleton structures with intersections handled by the simple and physically insightful optimization objective of minimizing cumulative bending energy. |
|
Extreme Mechanics Letters (EML), 2023 (* equal contribution) Source Code / Video / Oral Presentation Fully implicit frictional contact method for simulation of slender elastic rods. Enforces non-penetration and capable of reproducing sticking and sliding phenomena. Case study for flagella bundling in viscous fluid shown. |
|
Journal of Applied Mechanics (JAM), 2023 Source Code / Video Study of the snap buckling process of overhand knots. Discrete differential geometry based simulations and tabletop experiments are used to explore the onset of buckling as a function of topology, geometry, and friction. |
|
IEEE International Conference on Robotics and Automation (ICRA), 2022 Project Page / Video Preemptive motion planning via human object placement prediction using human pose and gaze as input. Rapidly outperforms traditional wait-and-react methods for human-to-robot pick-and-place operations. |
|
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2022 Source Code & Data Weak supervision approaches for automated vessel segmentation. Utilizes active contour models to generate weak labels and introduces low-cost human-in-the-loop strategies that drastically reduce labelling cost while maintaining segmentation accuracy. |
|
Journal of Applied Mechanics (JAM), 2021 Source Code / Video An implicit contact model for slender elastic rod simulation capable of enforcing non-penetration via smooth penalty energy and edge-to-edge minimum distance formulation. Sliding friction is handled semi-explicitly. Extensive physical validation through knot tying case study. |
|
|
|
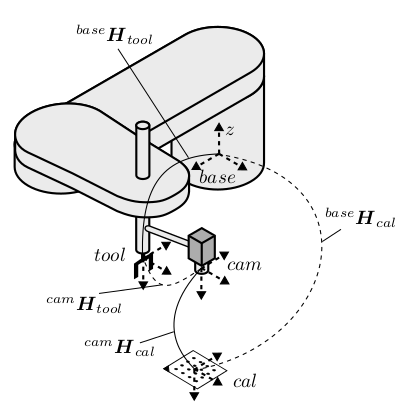
Source Code Implementation of the paper "Hand-Eye Calibration of SCARA Robots" by M. Ulrich. Completed as part of an internship at Vecna Robotics. |
|
Source Code ROS wrapper for OpenPose with support for key commercial cameras used by the robotics community. |
|
|
|
Video / CAD An Arduino controlled robot dog that I created while healing from a knee surgery. Can do simple functionalities such as sit and respond to praise. So far, the YouTube video has amassed over 135000 views! |

|
Video / CAD / News Coverage A manipulator capable of tying shoes. Built under the design constraints of using at most 2 motors and a $600 budget. Won a robotics competition against Meijo University, resulting in an all expense paid trip to Japan to present the robot. Was featured on several news outlets. So far, the YouTube video has amassed over 55000 views! |
|
Website source code adapted from Jon Barron If you'd like to use my website in any way, please contact me. |